
CSRS-PPP Updates and Information
- Upgrade from version 4 to version 5 with Galileo
- Products used in CSRS-PPP v5
- Description of CSRS-PPP outputs
- CSRS-PPP v5 Antenna Handling
- ITRF2020/IGS20/IGb20 Reference Frame Adoption
- Automatic decimation of high-rate static submissions
- CSRS-PPP upgrade to version 3 with ambiguity resolution
- How can you access help?
The Canadian Geodetic Survey (CGS) of Natural Resources Canada (NRCan) updated the Canadian Spatial Reference System Precise Point Positioning (CSRS-PPP) service on Wednesday, 14 May 2025. This CSRS-PPP update includes, for the first time, support for Galileo PPP with ambiguity resolution (Galileo PPP-AR) for E1/E5a observations collected beginning Sunday, 27 November 2022 when processed with either the Rapid or Final products. Submissions processed with the Ultra-rapid products will continue to support only GPS and GLONASS observations.
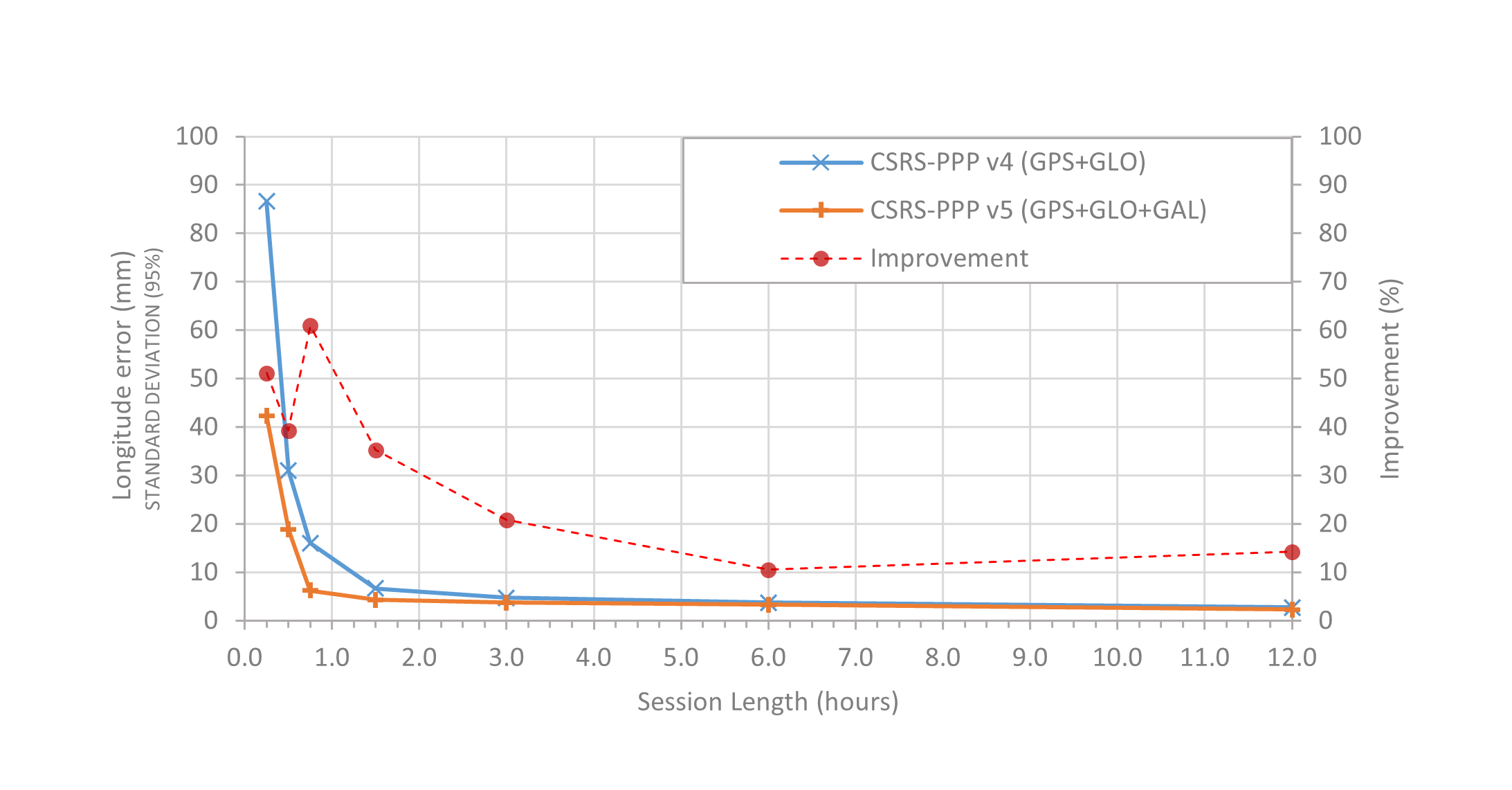
What are the benefits of adding Galileo observations to CSRS-PPP submissions?The main advantage of including dual-frequency Galileo observations in CSRS-PPP submissions is that they allow users to achieve improved accuracies, especially for shorter datasets, compared with only GPS and GLONASS submissions. This means that users can collect less data to meet their accuracy needs, mainly because, similarly to GPS, CSRS-PPP attempts to fix the integer ambiguities for Galileo when possible. More details on the CSRS-PPP ambiguity resolution algorithm can be found in the CSRS-PPP version 3 PPP‑AR tutorial. The addition of Galileo will also improve the satellite geometry, especially when tracking in less-than-ideal conditions. Figures 1 to 3 compare the achievable accuracies between CSRS-PPP v4 with GPS and GLONASS, and CSRS-PPP v5 with GPS, GLONASS, and Galileo, when processing geodetic-quality GNSS observation sets between 15 minutes and 12 hours. The CSRS-PPP v5 accuracy improvement can reach up to 40-60% for datasets of up to one hour and approximately 10-20% for 12 hours.


What other improvements are included in the CSRS-PPP v5 update?
In addition to the support for Galileo, there are various other improvements in CSRS-PPP v5, including:
- New in-house Final and Rapid GPS clock and phase bias combinations
- Addition of Center for Orbit Determination in Europe (CODE) Final and Rapid GLONASS and Galileo products
- Application of 2nd-order ionospheric corrections based on IGRF14
- Estimation of relative antenna Phase Centre Offsets (PCO) and Phase Centre Variations (PCV) for antennas without full multi-GNSS absolute PCO/PCV calibrations (see CSRS-PPP v5 antenna handling document for details)
- Correction for antennas not oriented north when the azimuthal offset is provided in the RINEX header
- Application of satellite attitude quaternions in ORBEX format
- Fixing of day-boundary discontinuities (DBD) in integer satellite clocks using an in-house estimated bias SINEX product
Since NRCan's Galileo products are still in development, it was decided to implement support for Galileo now using CODE's publicly available Final and Rapid Galileo products. The next steps for CSRS-PPP are to:
- Update the legacy IGS Final products for the period 1994 to 2022 using the combined IGS repro3 (GPS, GLONASS, and Galileo) products
- When NRCan’s new in-house GLONASS and Galileo products are available:
- Replace the CODE Final and Rapid GLONASS and Galileo products with NRCan’s own in-house products
- Introduce Ultra-rapid Galileo support
The currently supported signals in CSRS-PPP are:
- GPS: C1C, L1C, C2C, L2C, C1W, L1W, C2W, L2W, C2L, L2L, C2S, L2S, C2X, L2X
- GLONASS: C1C, L1C, C2C, L2C, C1P, L1P, C2P, L2P
- Galileo: C1X, L1X, C5X, L5X, C1C, L1C, C5Q, L5Q
Submission interfaces and input options will not change and there will be only minor changes to some output reports. See the description of the CSRS-PPP outputs below for details of the changes to the outputs as well as sample output files.
CSRS-PPP can only process GNSS observations if precise GNSS orbit, clock, and bias products are available. It will use the best products available at the time the data is submitted. Three product lines are available to CSRS-PPP users: Ultra-rapid ("EMR0[PPP]ULT_*"), Rapid ("EMR0[PPP]RAP_*"), and Final ("EMR0[PPP]FIN_*"), where [PPP] is a 3‑character code that refers to internal project/server specifications and "ULT|RAP|FIN" indicates the product line and refers to their latency.
Ultra-rapids:Ultra-rapid products are generated by NRCan and are available hourly to allow for PPP solutions approximately 1 to 2 hours after the last epoch of data. This delay is the time required to process GNSS data from globally distributed stations to estimate precise satellite orbits, clock corrections, and biases enabling PPP-AR. Currently, Ultra-rapid products support only GPS and GLONASS observations.
Rapids:Rapid products are computed daily and are available 17 to 18 hours after the end of the day. Rapids use the combined GPS orbits from the International GNSS Service (IGS) (Johnston 2017) and an in-house satellite clock and bias combination (Banville 2020) using products enabling PPP-AR provided by various IGS analysis centers. Since operational IGS rapid products include only GPS products, GLONASS and Galileo products from the Center for Orbit Determination in Europe (CODE) (Dach 2024a) are then incorporated into the combined GPS products to provide a multi-GNSS solution.
Finals:Final products are typically available 12 to 15 days after the end of the week. Beginning with CSRS-PPP v5, Final products have been deployed to support GPS, GLONASS, and Galileo constellations for data collected after Sunday, 27 November 2022. These products are computed with the same strategy as the Rapids, incorporating the Final combined IGS GPS orbits (Johnston 2017), an in-house satellite clock and bias combination (Banville 2020), as well as GLONASS and Galileo from the Final CODE products (Dach 2024b).
Note that when the IGS provides operational multi-GNSS products supporting PPP-AR, CSRS-PPP will likely switch to using those products.
Table 1 summarises the latency and the GNSS constellations supported by each product type for data collected after 27 November 2022.
Table 1: Products used in CSRS-PPP (for data collected after 27 November 2022)| Products | GNSS | Availability | Latency |
|---|---|---|---|
| Ultra-rapid | GPS GLONASS | Hourly | 90 minutes after the hour |
| Rapid | GPS GLONASS Galileo | Daily | 17-18 hours after the end of the day |
| Final | GPS GLONASS Galileo | Weekly | 12-15 days after the end of the week |
CSRS-PPP will always use the best products available at the time the data is submitted. Products with longer latencies should produce better PPP solutions, but as shown in Figure 4, the achievable accuracies between the Rapid and Final products is converging. Note that CSRS-PPP does not reprocess the observations when the more accurate products become available.
Final CSRS-PPP products currently used:
CSRS-PPP supports GPS observations beginning on 6 March 1994 using the Final combined orbit and clock corrections from the IGS. Beginning with the products of 14 August 2011, NRCan's GLONASS solutions are integrated into the IGS products, providing a multi-GNSS solution. Table 2 presents a comprehensive list of the products used, the satellite systems supported, and the availability of PPP-AR.
Table 2: Final products used in CSRS-PPP (for data collected beginning 6 March 1994)| Start date | ITRF realization | Products used | GNSS | Ambiguity resolution |
|---|---|---|---|---|
| 1994-03-06 | ITRF2005/IGS05 | IGS Repro1 | GPS | None |
| 2007-12-30 | ITRF2005/IGS05 | IGS Final | GPS | None |
| 2011-04-17 | ITRF2008/IGS08 | IGS Final | GPS | None |
| 2011-08-14 | ITRF2008/IGS08 | IGS Final + NRCan GLO | GPS+GLO | None |
| 2017-01-29 | ITRF2014/IGS14 | IGS Final + NRCan GLO | GPS+GLO | None |
| 2018-01-01 | ITRF2014/IGS14 | IGS Final + NRCan GLO | GPS+GLO | GPS |
| 2022-11-27 | ITRF2020/IGS20 | IGS Final + CODE GLO+GAL | GPS+GLO+GAL | GPS+GAL |
Banville S, Geng J, Loyer S, Schaer S, Springer T, Strasser S (2020) On the interoperability of IGS products for precise point positioning with ambiguity resolution. Journal of Geodesy, 94, 1-15.
https://doi.org/10.1007/s00190-019-01335-w.
Dach, R., S. Schaer, D. Arnold, E. Brockmann, M. Kalarus, M. Lasser, P. Stebler, A. Jaeggi (2024). CODE rapid product series for the IGS. Published by Astronomical Institute, University of Bern.
URL: http://www.aiub.unibe.ch/download/CODE; DOI: 10.48350/197026.
Dach, R., S. Schaer, D. Arnold, E. Brockmann, M. Kalarus, M. Lasser, P Stebler, A. Jaeggi (2024). CODE final product series for the IGS. Published by Astronomical Institute, University of Bern.
URL: http://www.aiub.unibe.ch/download/CODE; DOI: 10.48350/197025.
Johnston, G., Riddell, A., Hausler, G. (2017). The International GNSS Service. Teunissen, Peter J.G., & Montenbruck, O. (Eds.), Springer Handbook of Global Navigation Satellite Systems (1st ed., pp. 967-982). Cham, Switzerland: Springer International Publishing. DOI: 10.1007/978-3-319-42928-1.
The information below details the file formats output by CSRS-PPP with emphasis on those updated in v5.
- *UPDATED for version 5* A solution report (.pdf) presenting the PPP results in a combination of textual and graphical information. For report descriptions, see:
- *UPDATED for version 5* A summary file (.sum) which contains the parameters and the results of the PPP processing in (a machine-readable) text format. See summary file description.
- A position file (.pos) containing the positioning information for each epoch processed. See position file description.
- A tropospheric zenith delay file (.tro) containing dry and wet zenith path delay and tropospheric gradient for each epoch processed. See tropospheric zenith delay file description.
- A RINEX_CLOCK format file (.clk) containing the receiver clock offset and the clock offset sigma (95%) for each epoch processed. See clock file description.
- A comma-separated format text file (.csv) containing the positioning and clock information for each epoch processed.
- A JSON format residual file (.res) containing the solution residuals for each epoch/signal pair. See residual file description. A tool to transform residual files from JSON format to text (ASCII) format is available here.
- An error file in text (.txt) format containing any errors or warnings from the processing.
Sample output files:
Static solution, Kinematic solution, Residual fileBeginning with GNSS observations collected on Sunday, 27 November 2022, CSRS-PPP will output ITRF solutions in the IGS20 reference frame. This new reference frame is the International GNSS Service (IGS) realization of ITRF2020. For more information on the IGS20 reference frame, please see the IGS20 release announcements.
What will change in CSRS-PPP beginning 27 November 2022?- All IGS products beginning on this date will refer to the IGS20/ITRF2020 reference frames.
- The product names will follow the IGS long filenames standard. Specifically, for products starting on 1 January 2018, CSRS-PPP will use and report in the SUM file products based on the following nomenclature:
- Ultra-rapid hourly products (EMR0[PPP]ULT_*)
- Rapid daily products (EMR0[PPP]RAP_*)
- Final weekly products (EMR0[PPP]FIN_*)
- CSRS-PPP will adopt the new IGS20 absolute antenna calibrations.
where [PPP] are 3 characters that refer to internal project/server specifications and "ULT|RAP|FIN" indicates the product line.
The only change to CSRS-PPP solutions for observations collected prior to 27 November 2022 will be a switch to the IGS long filenames for products beginning on 1 January 2018.
What will be the impact on user solutions?The switch to IGS20 products will impact user solutions due to:
- The reference frame change from ITRF2014 to ITRF2020 (ITRF users only);
- GNSS antenna calibration updates from igs14.atx to igs20.atx; and
- Update of some IGS conventions and models.
Please see IGSMAIL-8238 for details.
Beginning with GNSS observations collected on Sunday, 2 February 2025, CSRS-PPP will output ITRF solutions in the IGb20 reference frame, an updated IGS realization of ITRF2020.
Beginning Friday, March 26, 2021, the CSRS-PPP service will automatically decimate high-rate static datasets to a data rate of 30 seconds. This will affect only dual-frequency, static datasets containing both code and phase data for which at least 75% of the expected 30 second intervals are available. For all other data sets, there will be no impact.
What are the benefits to automatically decimating high-rate static data sets?Automatically decimating high-rate data sets in static mode has benefits for the CSRS-PPP service, as well as the user. These include:
- Significantly reducing the processing time for each submission, allowing users to receive their results quicker while also reducing the amount of computing resources required.
- In static mode, processing data at rates higher than 30 seconds does not improve the accuracy of the solution. In fact, for short data sets it can actually reduce the accuracy. This is because CSRS-PPP uses precise GNSS clock products at a 30-second rate.
The following results show the RMS of the differences between CSRS-PPP and daily IGS estimated positions, for different observation session lengths (30 min, 1h and 24h), processed in static mode at 30 s and 1 s observation intervals.
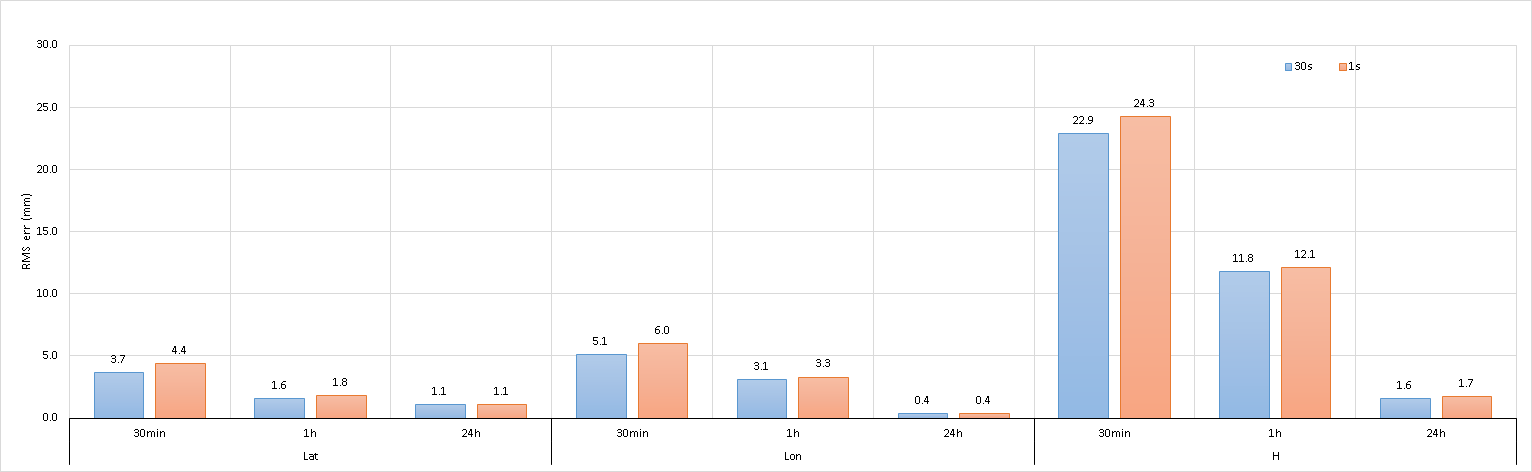
17 CACS files (30min-1h-24h obs) - SPARK v3.45.0 - AR - Static mode - GNSS (GPS+GLONASS)
The Canadian Geodetic Survey (CGS) of Natural Resources Canada (NRCan) updated the Canadian Spatial Reference System Precise Point Positioning (CSRS-PPP) service on Tuesday 20 October 2020. This CSRS-PPP modernization includes PPP with ambiguity resolution (PPP-AR) for data collected on or after 1 January 2018. More information about this update is available in the v2 to v3 update documentation.
A tutorial is available to describe the implementation of PPP-AR algorithms in CSRS-PPP version 3.
If you have questions or encounter issues that require assistance from CGS staff, please contact us by email.
Use of Canadian Geodetic Survey products and data is subject to the Open Government Licence - Canada
- Date modified: